I have been researching spiking neural networks for continuous control problems for the past two years of my PhD now. The journey has not always been easy, especially because this domain is relatively unexplored and there are not many real gold standards to guide the process. The topic of spiking neural networks (SNN) is also somewhat of a niche and not always well-represented at large ML conferences. Luckily, there is still a fantastic community with a weak spot for this topic. Once a year, they gather online for a meeting called “Spiking Neural Networks as Universal Function Approximators” or SNUFA.
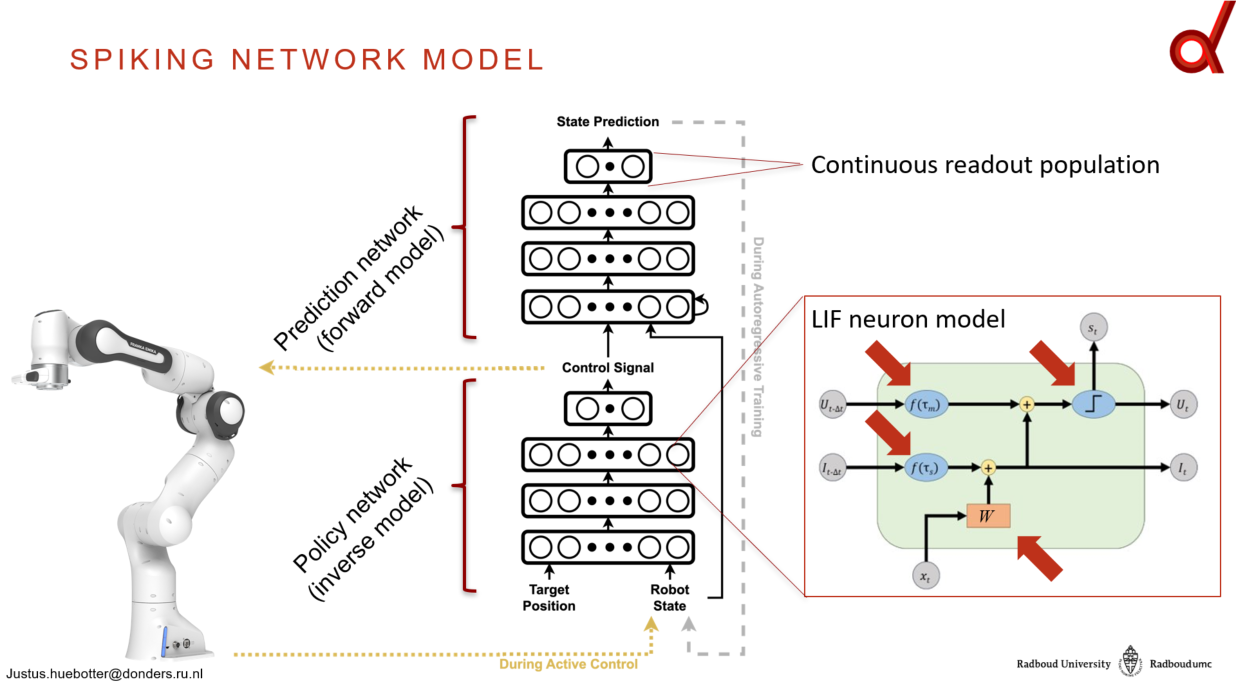
This year I had the honor of presenting my own research in this context and getting some great feedback from the community afterward. My 20 minute talk had the title “Training Spiking Neural Networks for Continuous Control with Surrogate Gradients” and is available online for anyone to see. In this work I explore what lessons from deep learning as well as classification problems with SNNs we can use in the domain of robotic control. It turns out, that initializing and training recurrent spiking while expecting smooth, continuous output for long sequences of time is tricky. If we look at the problems that arise step by step, we can learn quite a lot from past research and in the end arrive at networks with stable dynamics and efficient learning! For more details, watch the talk or stay tuned for the paper to come. I am currently finishing up this project and hope to have the manuscript out around the end of this year. The code for the project can already be found on GitHub.
If you have any questions or comments about my work, please do not hesitate to get in touch!
Leave a Reply